Томского политехнического университета
Newspaper of National Research
Tomsk Polytechnic University
Королевство роботов
Лаборатория промышленной робототехники — год с момента открытия
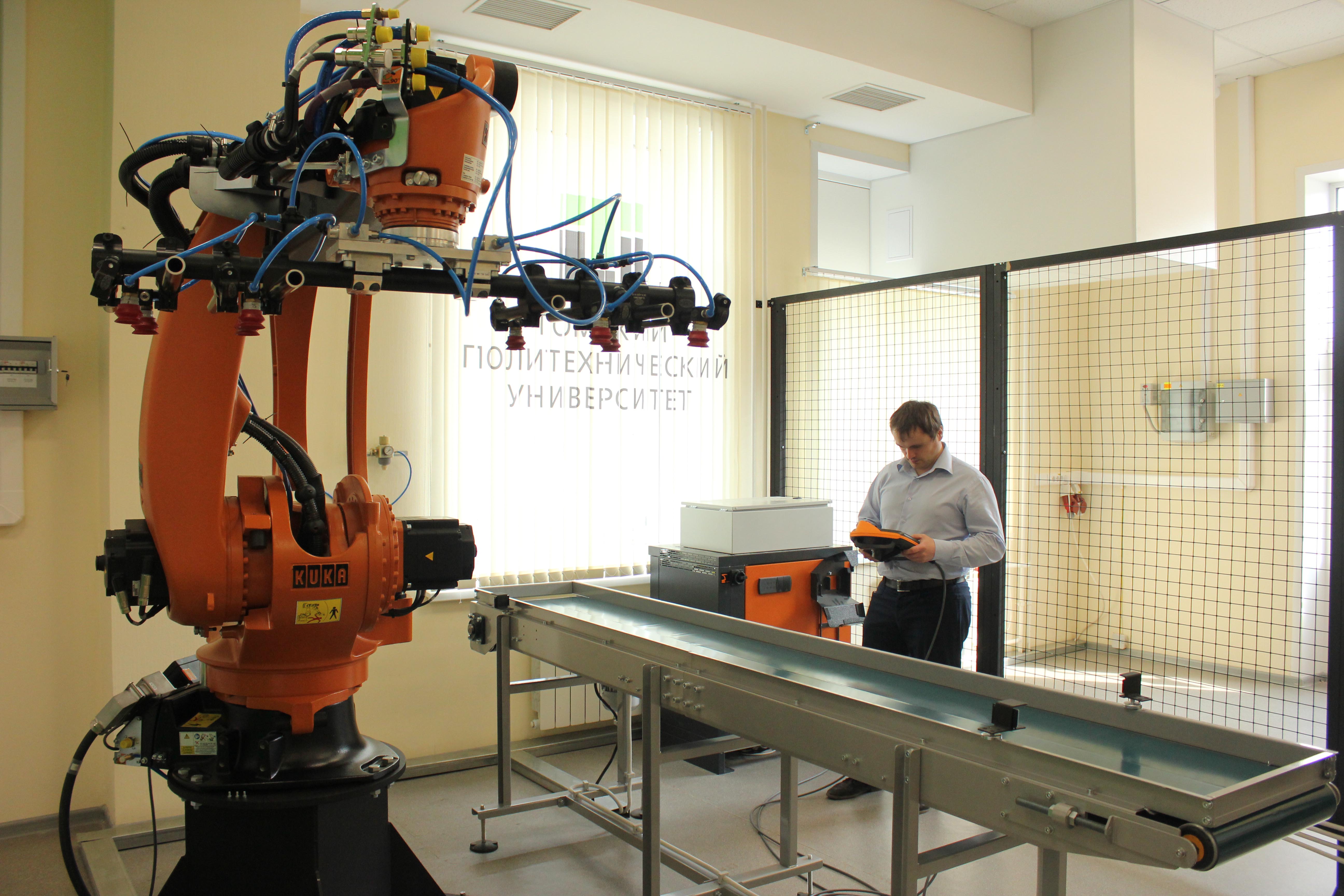
ЛАБОРАТОРИЯ ПРОМЫШЛЕННОЙ РОБОТОТЕХНИКИ ОФИЦИАЛЬНО ОТКРЫЛАСЬ НА ПЛОЩАДКЕ НАУЧНОГО ПАРКА ТОМСКОГО ПОЛИТЕХНИЧЕСКОГО УНИВЕРСИТЕТА В МАЕ 2016 ГОДА. ЦЕЛЬЮ РАБОТЫ НОВОЙ ЛАБОРАТОРИИ СТАЛО ВНЕДРЕНИЕ СОВРЕМЕННЫХ СРЕДСТВ РОБОТОТЕХНИКИ НА ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЯХ, ПОПУЛЯРИЗАЦИЯ НАПРАВЛЕНИЯ СРЕДИ СТУДЕНТОВ, АБИТУРИЕНТОВ И УЧЕНЫХ, ПОВЫШЕНИЕ КВАЛИФИКАЦИИ ПЕРСОНАЛА ПРИ РАБОТЕ С ОБОРУДОВАНИЕМ И ОБУЧЕНИЕ СПЕЦИАЛИСТОВ. О ТОМ, ЧТО ИЗМЕНИЛОСЬ ЗА ВРЕМЯ С МОМЕНТА ОТКРЫТИЯ ЛАБОРАТОРИИ, КАКИХ ЦЕЛЕЙ УДАЛОСЬ ДОСТИГНУТЬ И КАКИЕ НАПРАВЛЕНИЯ СЧИТАЮТСЯ НАИБОЛЕЕ ПРИОРИТЕТНЫМИ, КОРРЕСПОНДЕНТУ ГАЗЕТЫ «ЗА КАДРЫ» РАССКАЗАЛ И.О. ЗАВЕДУЮЩЕГО ЛАБОРАТОРИЕЙ НИКОЛАЙ КРИНИЦЫН.

Полная комплектация
По словам Николая Криницына, все оборудование, закупленное для лаборатории, поставлено в полном объеме, проверено и введено в эксплуатацию. На площадях Научного парка Томского политеха установлены шесть промышленных роботизированных комплексов на базе роботов KUKA. Кроме того, в комплектации лаборатории есть мобильные роботизированные системы KUKA youBot platform + KUKA youBot arm, а также недавно для нужд коллектива были закуплены квадрокоптеры. Каждый комплекс планируется использовать для реализации конкретной задачи.
— В лаборатории есть робот, на базе которого построена ячейка сварки, — KUKA KR 16-2, есть робот KR 120 R2700, оснащенный шпинделем, позволяющим проводить фрезерную обработку как металла, так и пластика. Он также может использоваться для 3D-прототипирования. Имеется в составе лаборатории и ячейка для паллетирования — KR 40 PA — робот, который предназначен для перемещения тяжелых грузов, в том числе с конвейерной ленты на паллет при помощи вакуумного захвата. Кроме того, у нас есть семиосевой коллаборативный, первый в мире серийно выпущенный чувствительный робот LBR iiwa. На каждой его оси установлен силомоментный датчик. Этого робота мы планируем активно использовать во всех проектах по взаимодействию человека и робота. Еще один робот — AGILUS R900 — отличается от других. Он рассчитан на малую массу нагрузки — до трех килограммов, но уникален тем, что является одним из самых быстрых и точных в своем классе. Этой ключевой особенностью мы планируем пользоваться. Последний робот — AGILUS — рассчитан на более меньший вес, выполнен в виде учебной ячейки. Его планируется использовать непосредственно в учебном процессе. Он специально оснащен системой, позволяющей обеспечить необходимую безопасность студентов и обслуживающего персонала, — рассказывает Криницын.
Что же касается мобильных систем KUKA youBot platform + KUKA youBot arm и квадрокоптеров, то их планируется задействовать в том числе и в проектах, связанных с решением задач по групповому управлению мехатронными устройствами при совместном выполнении тех или иных видов деятельности (поиск людей и объектов, перемещение предметов, картографирование и др.).
— Яркий пример — при разборе завалов, поиске людей или каких-либо предметов часто недостаточным оказывается присутствие одного человека или квадрокоптера с камерой, а требуется комплексное решение задачи. Мы занимаемся разработкой специального программного обеспечения, координирующего действия роботехнической системы, в данном случае состоящей из KUKA youbot, квадрокоптеров и средств связи. В работу уже вовлечены студенты и магистранты ТПУ, — делится собеседник.
Уникальное ПО и синтез новых материалов
По мнению сотрудников лаборатории, роботов можно и нужно использовать в различных сферах деятельности — от медицины до изготовления новых сплавов и 3D-моделирования. Причем большая часть проектов реализуется в составе коллабораций как с подразделениями ТПУ, так и с промышленными партнерами.
Например, одним из проектов является разработка программного обеспечения, позволяющего дистанционно разрабатывать, отлаживать и запускать управляющие программы для роботов KUKA youBot. Работающая версия программы уже готова и внедрена в использование системным интегратором KUKA — ООО «Вектор Групп» (г. Москва). В ближайшее время планируется создать продукт, пригодный для управления промышленными роботами.
— 2016 год прошел в режиме поиска направлений и ниш, взаимодействия со специалистами, которых можно было бы вовлечь в потенциальные проекты. Например, сейчас крайне актуальным направлением является синтез новых материалов с уникальными свойствами, в частности карбидов вольфрама и титана. Нас заинтересовала идея, предложенная начальником отдела системных исследований Александром Паком. Карбиды вольфрама и титана — очень востребованные материалы, существуют промышленные технологии их изготовления, однако присутствует и естественная тенденция к удешевлению процессов. Научный коллектив под руководством Александра Пака занимался этой задачей, но без использования мехатронных устройств. В лаборатории есть все необходимое сварочное оборудование и сопутствующие материалы. Кроме того, роботизированные комплексы обладают высокими точностными характеристиками, что позволит нам обеспечить высокую повторяемость в процессе проведения эксперимента, создавая базу для формирования новой востребованной технологии, — говорит наш собеседник.
Синтез карбидов титана и вольфрама путем сварки, по мнению разработчиков, позволит не только снизить затраты на производство, но и уменьшить роль человеческого фактора. Сейчас политехники заняты привлечением финансирования для проекта со стороны промышленного и государственного секторов.
Про науку в рамках «Науки»
Кроме того, в настоящее время политехники выполняют проект в рамках госзадания «Наука». Специалисты работают над созданием системы повышения точности робототехнических комплексов. — В итоге планируется разработать специальное программное обеспечение для обработки видеоряда — по периметру робототехнического комплекса будут установлены камеры, снимающие перемещение рабочего органа робота. При изучении материалов съемки можно будет увидеть, где именно робот не обеспечил требуемое положение рабочего органа. Тем самым мы сможем повысить точность работы робота, используя алгоритмы компьютерного зрения, — поясняет политехник.
Николай Криницын отмечает, что в итоге планируется получить программно-аппаратную платформу, которой можно будет оснащать произвольно выбранного робота. Реализация проекта рассчитана на три года. В статье описана лишь часть перспективных проектов, над которыми самостоятельно или в составе коллабораций работают сотрудники лаборатории. Коллектив лаборатории готов предложить интересные задачи и для новых участников.
Наталья Каракорскова