Томского политехнического университета
Newspaper of National Research
Tomsk Polytechnic University
Механическое будущее
Каких роботов можно встретить в Томском политехе
К 2030 ГОДУ РОБОТОВ БУДЕТ БОЛЬШЕ, ЧЕМ ЛЮДЕЙ, УВЕРЕН ГЛАВНЫЙ ФУТУРОЛОГ КОМПАНИИ CISCO ДЭЙВ ЭВАНС. С НИМ СОГЛАСНЫ МНОГИЕ СОВРЕМЕННЫЕ УЧЕНЫЕ: В БЛИЖАЙШЕМ БУДУЩЕМ КОЛИЧЕСТВО МЕХАНИЧЕСКИХ ПОМОЩНИКОВ БУДЕТ НЕУКЛОННО РАСТИ. СПЕЦИАЛИСТЫ УЖЕ СОСТАВЛЯЮТ СПИСКИ ПРОФЕССИЙ, В КОТОРЫХ РОБОТЫ ВСКОРЕ ЗАМЕНЯТ ЧЕЛОВЕКА, ПОВЫСИВ ТОЧНОСТЬ И СКОРОСТЬ ВЫПОЛНЕНИЯ ЗАДАЧ. ТАКИЕ СОТРУДНИКИ НЕ ЕДЯТ, НЕ СПЯТ, НЕ УСТАЮТ И БЕЗ ПРОБЛЕМ СПРАВЛЯЮТСЯ ДАЖЕ С САМОЙ МОНОТОННОЙ РАБОТОЙ, НА КОТОРУЮ ЧЕЛОВЕКУ В БУДУЩЕМ НЕ ПРИДЕТСЯ ТРАТИТЬ СИЛЫ. В ИНСТИТУТЕ КИБЕРНЕТИКИ ТОМСКОГО ПОЛИТЕХА РАЗРАБОТКЕ И ПРОГРАММИРОВАНИЮ «УНИВЕРСАЛЬНЫХ РАБОТНИКОВ» ПОСВЯЩЕНА ЦЕЛАЯ ОБРАЗОВАТЕЛЬНАЯ ПРОГРАММА. ЗДЕСЬ МОЛОДЫЕ УЧЕНЫЕ ВУЗА И СТУДЕНТЫ СОЗДАЮТ НЕ ТОЛЬКО САМИХ РОБОТОВ, АДАПТИРОВАННЫХ ПОД РАЗНЫЕ ЗАДАЧИ, НО И АВТОМАТИЗИРОВАННЫЕ ТЕХНИЧЕСКИЕ СИСТЕМЫ. В МАЕ В ТПУ ОТКРЫВАЕТСЯ НОВАЯ ЛАБОРАТОРИЯ ИНДУСТРИАЛЬНОЙ РОБОТОТЕХНИКИ, ГДЕ СОБРАНЫ МОЩНЕЙШИЕ ПРОМЫШЛЕННЫЕ РОБОТЫ, СУЩЕСТВУЮЩИЕ В МИРЕ. В БУДУЩЕМ УСТРОЙСТВА, СОЗДАВАЕМЫЕ ПОЛИТЕХНИКАМИ, МОГУТ ПРИМЕНЯТЬСЯ В ПРОМЫШЛЕННОСТИ, МЕДИЦИНЕ И ОБОРОНЕ, ОБРАЗОВАНИИ И БЫТУ. ПРЕДСТАВЛЯЕМ ВАМ ПОДБОРКУ САМЫХ ИНТЕРЕСНЫХ ПРЕДСТАВИТЕЛЕЙ МИРА РОБОТОТЕХНИКИ ТПУ.
Робот-паук гексапод

Возможности: перемещение практически по любому рельефу.
Область применения: исследование труднодоступной местности, военная разведка, проведение спасательных операций.
Гексапод — это мобильное устройство, способное передвигаться не только в любых направлениях, но и по разным типам местности, что отличает его от колесных и гусеничных роботов. Принимает решения в процессе движения гексапод сам: он оснащен техническим зрением — системой датчиков, определяющих расстояние до предметов, и камерой. «Органы чувств» робота позволяют оценить обстановку и выбрать нужный алгоритм для преодоления того или иного препятствия или поиска обходного пути. Высокоскоростной контроллер позволяет быстро обрабатывать информацию и оперативно принимать решение, зачастую даже быстрее, чем это сделал бы человек. Шесть «ног» паука обеспечивают ему устойчивость и скорость. При этом он оснащен системой «резервирования» конечностей: если одна или две «ноги» выйдут из строя, гексапод на ходу перестроит модель движения и сохранит не только равновесие, но и способность передвигаться. Робот-паук создан, чтобы быстро и без участия человека исследовать труднодоступную местность, проводить спасательные операции и осуществлять военную разведку. Конструкция «паука» позволяет устанавливать на него дополнительное специализированное оборудование, благодаря которому он сможет провести детальную съемку местности, построить карту заброшенной шахты или городского подземелья, определить глубину горного разлома или впадины, принести небольшие образцы грунта или породы для исследований.
Робот-футболист Darwin
Возможности: выполнение движений, подобных человеческим.
Область применения: соревнования по робототехнике. Антропоморфные Darwin всего около 60 сантиметров в высоту, но стараются во всем походить на людей: могут ходить, бегать, танцевать. Они используются для исследований в таких областях, как теория управления, компьютерное зрение и машинное обучение. Кинематика робота может быть запрограммирована в зависимости от задачи, а выполнять ее он будет, опираясь на собственные решения.
Darwin обладает зрением, подобным человеческому: через встроенную камеру он способен распознавать образы окружающих предметов. Определяя таким образом рельеф поверхности, робот выбирает нужный алгоритм движения, что позволяет ему устоять на ногах как на твердом асфальте, так и на песке, земле или траве и уверенно продолжить прогулку.
В Томском политехе четыре таких робота. Сейчас основная цель политехников — подготовка к чемпионату по робофутболу RoboCup. На поле выйдут сразу три Darwin: двое нападающих и вратарь. Действовать на поле роботы будут полностью самостоятельно: им предстоит находить мяч и пытаться забить его в ворота соперника, а в случае падения подниматься без помощи человека.
Поведение роботов основывается на алгоритме командного (группового) действия. Универсальные поведенческие модели ученые адаптируют под спе- цифику робофутбола. Например, разрабатываются алгоритмы для роботов-футболистов, позволяющие при падении получать наименьшие повреждения.

Промышленный помощник Youbot

Возможности: транспортировка и захват предметов.
Область применения: автоматизация производственных процессов.
Многонаправленная платформа с манипулятором имеет открытый интерфейс, благодаря чему служит для исследования процесса мобильной манипуляции в целом. Кроме того, Youbot может быть дополнительно оснащен камерой, датчиками расстояния, лазерным сканером. Такой мобильный «подмастерье» позволяет робототехникам ТПУ разрабатывать новые алгоритмы для создания технологий так называемой фабрики будущего — роботизированного интеллектуального производства.
Система дистанционного управления роботами
Возможности: дистанционное управление роботами.
Область применения: использование роботов в местах, труднодоступных для человека.
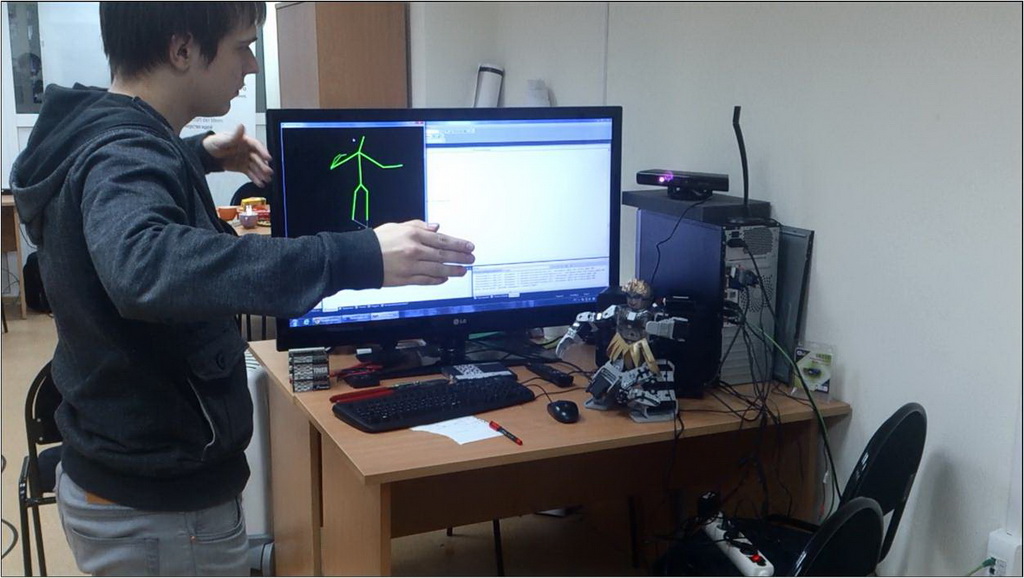
Выполнять работы в местах, опасных для пребывания человека, и проводить медицинские операции на расстоянии — такие возможности предоставляет алгоритм дистанционного управления роботом. Например, можно будет использовать роботов-хирургов в малонаселенных или удаленных районах, где нет специалистов для проведения операций. Проводя на своем рабочем месте операцию на макете, врач сможет управлять движениями робота, который будет работать непосредственно с пациентом.
Система телеуправления использует безмаркерную технологию захвата движения оператора — фиксирует их через сенсорный контроллер Kinect. После этого программа обрабатывает движения и отдает команду роботу. Сейчас ведется совершенствование программного обеспечения системы.
Подобные алгоритмы и программы можно применить к самым разным аппаратным комплексам: чем более они совершенны, тем более точно сможет действовать робот.
Робот-олень Zizibot
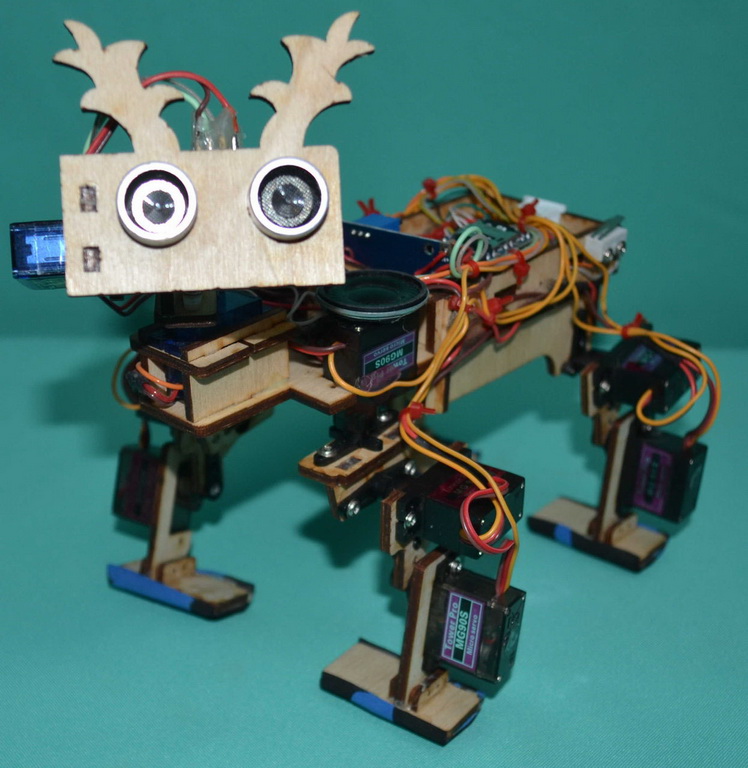
Возможности: передвижение и «общение» с пользователем.
Область применения: обучение студентов и школьников основам программирования.
Это простой и одновременно функциональный конструктор для сборки роботов, созданный учеными Юргинского технологического института. В основе Zizibot — оргстекло и фанера, часть деталей напечатаны на 3D-принтере, а в качестве «начинки» используется открытая платформа Arduino. Как рассказывают разработчики, конструктор они создали для занятий молодых робототехников вуза. В институте уже собрали несколько оригинальных моделей. Это робот-олень, собака, сварочный робот, борец сумо для спортивных соревнований роботов. Их конструкция позволяет одновременно управлять 12 степенями свободы робота, что в четыре раза превышает возможности аналогов.
Готовых роботов и конструкторы Zizibot ученые Томского политеха уже запустили в производство, стать обладателем робота-оленя может каждый. Робот умеет самостоятельно обходить препятствия, ориентироваться в пространстве и разговаривать, а запрограммировать его можно по инструкции, созданной политехниками.
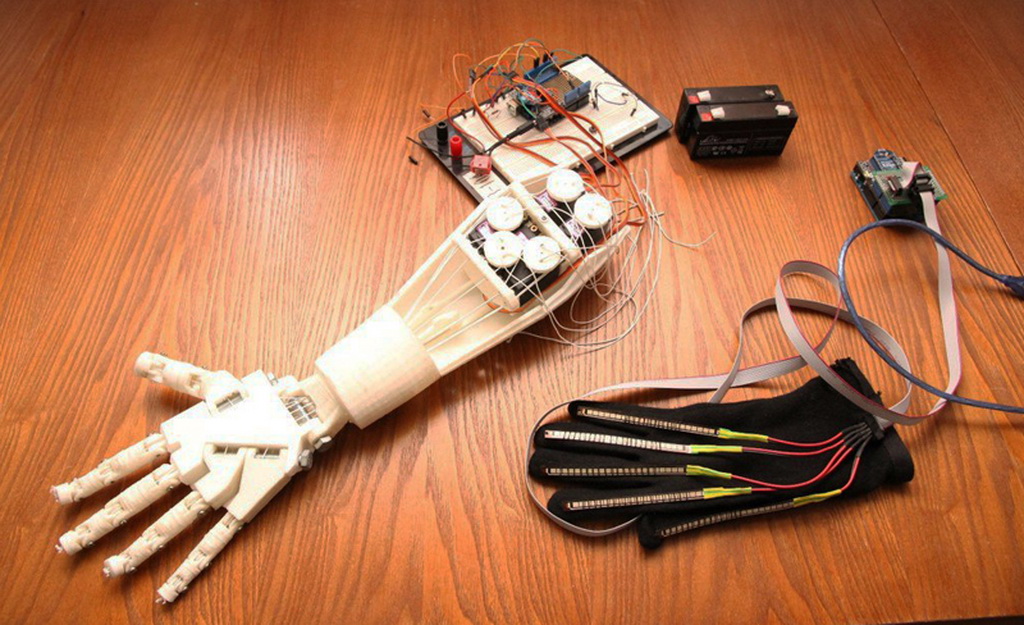
Роботизированная рука
Возможности: удаленное управление с помощью перчатки.
Область применения: восстановление тонуса мышц после операции и выполнение работ в труднодоступных местах.
Устройство состоит из двух частей: «напечатанная» на3D-принтере рука и перчатка с присоединенными к ней сенсорами. Информация между ними передается через беспроводную сеть, и манипулятор повторяет малейшие движения человеческой руки, на которую надета перчатка.
Разработка способна выполнять широкий спектр задач в промышленности, медицине и технике. Роботизированная рука может использоваться в качестве тренажера для пациентов, которым необходимо восстанавливать мышечную активность после инсульта или операции. Если перчатку надеть на здоровую руку, а на больную сделать накладку, то, повторяя движение первой руки, манипулятор будет помогать растягивать мышцы и восстанавливать их тонус.
Устройство также найдет широкое применение на предприятиях различных отраслей. Например, позволит ремонтировать труднодоступные объекты — оператор будет управлять им удаленно с помощью перчатки.
Подготовила Елизавета Муравлева
Справка
III Форум молодых ученых U-NOVUS, главным оператором которого вновь стал Томский политех, пройдет 12–13 мая в Томске. В этот раз он посвящен теме робототехники. В рамках форума состоится открытие Сибирского центра робототехники и перспективных исследований, Национальный этап RoboCup Russia Open — 2016, Всероссийская научная игра Science Game. Одним из самых интересных событий форума станет выставка инновационных разработок в сфере робототехники, на которой передовые научно-технические и технологические достижения в сфере робототехники представят российские производители. Гостями выставки станут представители крупного и среднего бизнеса, госкорпораций, институтов развития, разработчики и производители. Она будет работать в течение двух дней, 12–13 мая, на основной площадке форума молодых ученых U-NOVUS (СК «Гармония»). Организатор форума U-NOVUS — администрация Томской области, оператор — Национальный исследовательский Томский политехнический университет. Генеральный партнер форума — АО «Газпромбанк». Генеральный информационный партнер — ТАСС.